G.I. Joe
Overview:
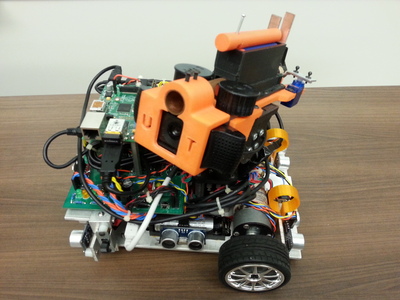
Robot Name: G.I. Joe
Team: Graduate Robotics Team
Team Placement: 1st Place
Event: IEEE SoutheastCon 2014
Division: Open Hardware Competition
Location: Lexington, KY
Competition Description:
In this competition students were tasked with navigating a course while shooting foam darts at a target mounted at one end of the course. The course had lines drawn on it to assist with navigation, and three blue squares were placed on these lines. The goal of the competition was for the robot to drive to each blue square and fire a dart at the target while on top of the square. Then the robot had to travel to a red goal square to complete the run. The teams were scored on their accuracy in hitting the target as well as the time required to complete the entire run. Official Rules
Team Members:
- Ammar Alkuwaiter - Team Leader, Arduino Development Lead, Navigation
- Joe Bray - Team Leader, Hardware Design Lead
- Jacob D’avy - Image Processing, Target Acquisition
- Ben Goodrich - Image Processing, Target Acquisition
- David Jackson - Launcher Design, Hardware
- Benjamin Martin - Software Design Lead, Serial Communication
- Nicole Pennington - Team Assistant
- Alexander Saites - Hardware Calibration
- Aravinda Ramakrishnan Srinivasan - Machining & Image Processing Assistant
Video:

Gallery: