Ferrisbot
Overview:
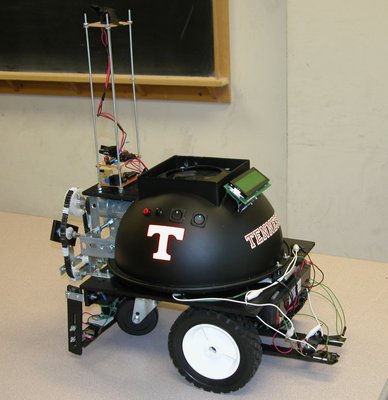
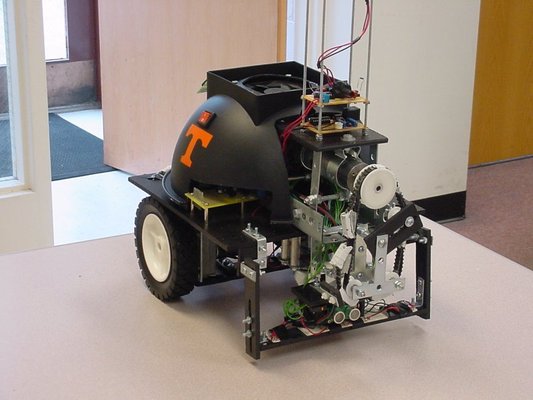
Robot Name: Ferrisbot
Team Placement: 3rd Place
Event: IEEE SoutheastCon 2004
Division: Student Hardware Competition
Location: Greensboro, NC
Competition Description:
The task to be performed by the robot was to autonomously “hunt” small metal balls in a given order. Specifically, each of three animals (rabbit, duck, and deer) were represented by a small metallic ball. These balls were picked up in an order that was given through IR UART during the hunt. The balls were then deposited in a box at the parking station. Official Rules
Team Members:
- Jonathon Britton - Chassis Design
- Will Curtis - Stoplight/IR Decoding
- Jacob DePriest - Stoplight/IR Decoding
- Scott Fields - Line Tracking
- Brett Hatch - Ball Collection and Delivery
- Brendan MacDonald - Line Tracking
- Brian Nelson - Chassis Design
- Justin Reed - Ball Collection and Delivery
Video:

Gallery: